
As the European Space Agency progresses toward long-term lunar exploration through its Argonaut programme, robotic manipulation systems are becoming one of the critical enabling technologies required to support future lunar logistics, infrastructure deployment and surface operations.
Within the ESA-funded MANUS project, Polish company PIAP Space has developed and validated a modular robotic manipulator system designed to support a broad range of future lunar mission scenarios, including cargo unloading, robotic surface operations, infrastructure support, payload deployment, inspection activities and scientific exploration tasks.
The Argonaut lunar landers are expected to provide Europe with independent cargo delivery capabilities to the Moon, enabling transportation of scientific payloads, exploration systems, infrastructure modules and logistics elements necessary for sustained lunar operations. Once landed, robotic systems will play a key role in transferring payloads to the lunar surface and supporting operations in environments where direct astronaut intervention may initially be impossible or highly limited.
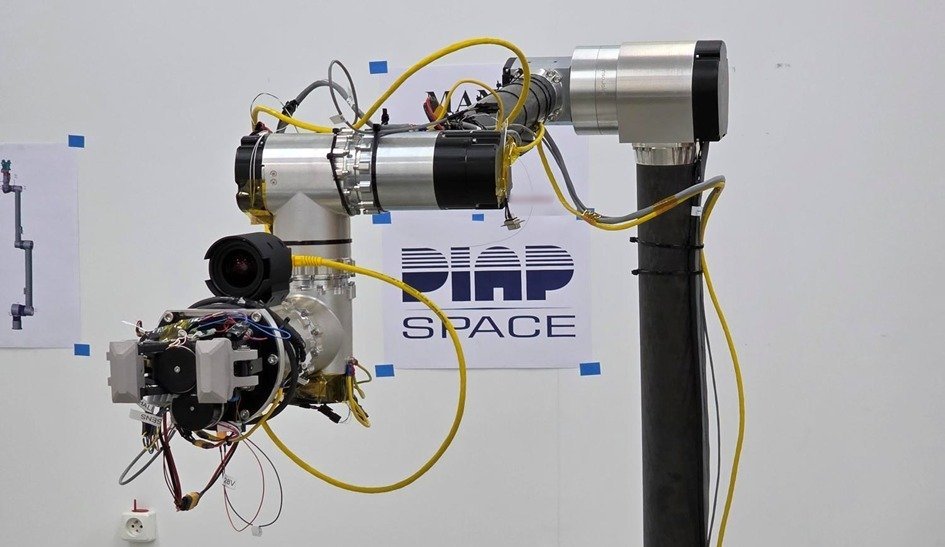
To address these challenges, PIAP Space developed a breadboard model of a 6-degree-of-freedom (6 DOF) robotic manipulator system under MANUS (Manipulator for Argonaut Payload Needs and Unloading Support).
Unlike traditional single-purpose robotic arms, the MANUS system, by PIAP Space, was designed as a modular robotic architecture integrating multiple subsystems, including robotic joints in three size classes, an advanced robotic end-effector, a dedicated Vision System (VS), a Force and Torque Sensor (FTS), and a Robotic Control Unit (RCU). The modular approach allows the system to be adapted to different mission profiles and operational scenarios expected in future lunar exploration missions.
A major focus of the project was the development of a lightweight yet highly rigid structure capable of maintaining precision across demanding operational conditions. The manipulator combines carbon fibre reinforced polymers (CFRP) with metallic booms, balancing low mass with structural stiffness required for accurate robotic operations over a large workspace.
The system underwent an extensive test campaign validating both manipulation performance and operational robustness. Demonstrated scenarios included payload handling, sample deposition operations, visual inspection tasks, load exertion demonstrations, deployment from launch configuration and operation throughout the manipulator’s full reachable workspace. Additional testing included emergency braking scenarios, validating safety and control performance under dynamic conditions.
The project successfully demonstrated key robotic manipulation capabilities relevant for future lunar surface logistics and robotic exploration activities. Importantly, the tests confirmed the feasibility of the proposed modular architecture for complex robotic operations beyond Earth orbit.
The technological heritage behind MANUS builds directly on PIAP Space’s broader robotic expertise developed across multiple ESA programmes related to orbital servicing, robotic manipulation and planetary exploration systems.
This includes the TITAN project focused on robotic systems for in-orbit servicing applications, as well as the development of the LARIS robotic gripper designed for satellite capture operations. PIAP Space also contributed to planetary exploration technologies through projects related to rover mobility systems and robotic operations for future exploration missions.
The growing importance of robotic logistics and autonomous manipulation technologies is expected to become one of the foundations of future lunar exploration architectures. Before sustainable human presence on the Moon can be established, robotic systems will need to autonomously unload cargo, deploy infrastructure, support scientific activities and assist surface operations in harsh lunar environments.
Building on the experience and technological heritage developed during MANUS, PIAP Space continues preparations for future ESA robotic exploration opportunities focused on lunar surface systems, robotic manipulation technologies and modular payload support solutions for future European lunar missions.
About PIAP Space
PIAP Space is a Polish space robotics company specializing in robotic systems for orbital servicing, planetary exploration and autonomous space operations. The company acts as prime contractor in European Space Agency projects focused on robotic manipulation, mobility systems and future in-space servicing technologies.
Media Contact
Maciek Mysliwiec
Space Agency
maciek@spaceagency.biz
+48 884 778 177